Updates reachability/WALKTHROUGH.md's "What's next" section with:
- PJ reduction approach + validation (0.1% max error on n over 50 min)
- Concrete reach horizons: 60s and 300s clean, 1800s+ partial
- Per-halfspace pass/fail against inv1_holds at T=300s
- Low-T_avg-trip tube looseness flagged as over-approximation, not
physical failure
- 30x horizon improvement framing
Also: refresh reach_operation_result.mat so the Pluto app has live data
to ingest (ran reach_operation.jl; six halfspace margins match the
MATLAB/Julia baseline, all discharged).
Co-Authored-By: Claude Opus 4.7 (1M context) <noreply@anthropic.com>
21 KiB
Linear Reach Analysis — Walkthrough
Status: preliminary example for the HAHACS thesis, not a final safety proof. The linear-reach artifacts in this directory use linearization of a nonlinear plant, which means every safety claim here is approximate, not sound. The follow-on nonlinear reach (via ReachabilityAnalysis.jl) will close that gap.
This document is a self-contained walkthrough of what got built, what it proves, and where it falls short. Read it cold; you shouldn't need the conversation transcript.
Contents
- The per-mode reach-obligation taxonomy
- Mode boundary definitions (entry / exit / time budgets)
- Code walkthrough: how each artifact works
- Results: what's proven, what isn't
- Caveats, gaps, and next steps
1. The per-mode reach-obligation taxonomy
The controller has four DRC modes. They are not all reach-analyzed the same way. Two fundamentally different reach obligations apply:
- Equilibrium modes (
q_shutdown,q_operation) — the plant is parked at some setpoint. The obligation is forever-invariance: does the state stay in the safe set under bounded disturbance? - Transition modes (
q_heatup,q_scram) — the plant is being driven from one mode's territory to another's. The obligation is reach-avoid: fromX_entry, reachX_exitwithin a bounded time budget[T_min, T_max], maintaininginv_holdsalong the way. There is essentially no external disturbance in these modes.
The whole point of doing per-mode reach is not generic disturbance
rejection — it's to prove that the DRC's discrete transitions (which
ltlsynt guarantees at the discrete level) actually fire in physical
time on the real plant. The reach artifact is what transfers discrete
correctness to physical correctness. If q_heatup's reach set never
enters t_avg_in_range ∧ p_above_crit ∧ inv1_holds, the DRC is written
against a transition that can't physically happen, and the hybrid
composition is broken.
Taxonomy table
| Mode | X_entry |
X_safe (along trajectory) |
X_exit or goal |
T_max |
|---|---|---|---|---|
| shutdown (eq.) | q_shutdown at DRC init (n small, T near T_standby) |
inv_shutdown_holds (TBD) |
t_avg_above_min |
— |
| heatup (trans.) | X_exit(shutdown) |
inv1_holds (fuel + rate + subcooling) |
t_avg_in_range ∧ p_above_crit ∧ inv1_holds |
5 hr |
| operation (eq.) | X_exit(heatup) |
inv2_holds (trip avoidance) |
stays forever OR ¬inv2_holds → scram |
— |
| scram (trans.) | X_exit(operation) ∪ X_exit(heatup) (either can scram) |
inv_scram_holds — n monotone non-increasing |
n ≤ 1e-4 |
60 s |
Formal claim per mode
Example for heatup:
Given x(0) ∈ X_entry(heatup),
applying u = ctrl_heatup(t, x, plant, ref),
with Q_sg = 0 (no external disturbance),
and α ∈ α_nominal [optionally: · (1 ± δ)],
we show ∃ T ∈ [T_min, T_max] such that:
x(T) ∈ X_exit(heatup) [reach]
x(t) ∈ inv1_holds ∀t ∈ [0, T] [avoid]
Operation mode is structurally different — no explicit T, obligation is forever-invariance under disturbance:
Given x(0) ∈ X_entry(operation),
applying u = ctrl_operation_lqr(x),
with Q_sg ∈ [w_lo, w_hi],
we show x(t) ∈ inv2_holds ∀t ≥ 0.
2. Mode boundary definitions
Concretized in predicates.json under mode_boundaries. Values are
engineering-reasonable-but-made-up for this preliminary demo; they
are not calibrated to a specific plant's tech specs. Final thesis defense
will require real tech-spec numbers.
q_shutdown (equilibrium)
X_entry:n ∈ [1e-7, 1e-4],T_f = T_c = T_cold ∈ [270, 280] °CX_safe: TBD — conservative: stay nearT_standby = 275 °CwithnsubcriticalX_exit:T_c ≥ T_standby + 5.556(operator has warmed the coolant above thet_avg_above_minthreshold)T_max: none (equilibrium mode)
q_heatup (transition)
X_entry:n ∈ [5e-4, 5e-3],T_f ∈ [275, 295],T_c ∈ [281, 295],T_cold ∈ [270, 281]. "Operator has warmed coolant past t_avg_above_min and pulled rods toward criticality."X_safe = inv1_holds: fuel centerline ≤ 1200 °C, T_cold subcooled,|dT_c/dt| ≤ 50 °C/hr(tech-spec 28 °C/hr + overshoot budget).X_exit = t_avg_in_range ∧ p_above_crit ∧ inv1_holds:T_c ∈ [T_c0 ± 2.78],n ≥ 1e-4, all inv1 halfspaces.T_max = 5 hours = 18000 s. Rationale: tech-spec 28 °C/hr over a 60 °F (33.3 °C) span is 1.19 hr nominal; 4× margin.T_min = 2 hr 8.6 min = 7714 s. Physical floor: heatup faster than 28 °C/hr violates the rate invariant; accounting for non-uniform ramp, can't exceed ~1/1.3 × the tech-spec time.
q_operation (equilibrium)
X_entry = X_exit(heatup)X_safe = inv2_holds: fuel limit, T_c high/low trip, n high/low, cold-leg subcooled. Conjunction of 6 halfspaces.- Disturbance:
Q_sg ∈ [0.85, 1.00] · P_0(grid load-follow envelope; could tighten to ±5% steady-state or widen to ±30% for aggressive load-following). T_max: none (equilibrium mode).
q_scram (transition)
X_entry: any state whereinv1_holdsorinv2_holdsfails.X_safe:n'(t) ≤ 0(monotone non-increasing power) AND temperatures bounded.X_exit:n ≤ 1e-4.T_max = 60 s. Rationale: NRC requires subcritical within seconds; 60 s is generous for our lumped model with idealized rod insertion.
3. Code walkthrough
Files in code/ (Julia) and reachability/ (JSON + docs) and what each does.
Note: as of 2026-04-20, all reach / plant / controller code is Julia. The pipeline was ported end-to-end from an earlier MATLAB implementation. Numerical results match MATLAB to machine precision on per-halfspace margins; trajectories match to ~3 decimals (different ODE solvers, same stiff family).
predicates.json
Single source of truth for all predicate concretizations. Three categories:
operational_deadbands— soft bands used by the DRC for mode transitions (t_avg_above_min,t_avg_in_range,p_above_crit).safety_limits— hard one-sided halfspaces for physical damage mechanisms and trip setpoints (fuel_centerline,t_avg_high_trip,t_avg_low_trip,n_high_trip,n_low_operation,cold_leg_subcooled,heatup_rate_upper,heatup_rate_lower).mode_invariants—inv1_holds,inv2_holdsas conjunctions ofsafety_limits.
Plus mode_boundaries (entry/exit/time budgets per mode, as above).
code/src/load_predicates.jl
Reads the JSON, resolves rhs_expr strings (which reference
plant-derived constants like T_c0, T_cold0, T_standby) into numeric
bounds, and returns a pred struct. Key entries:
pred.constants % T_c0, T_f0, T_cold0, T_standby, etc.
pred.operational_deadbands % struct of (A_poly, b_poly, meaning)
pred.safety_limits % same
pred.mode_invariants.inv1_holds % conjunction of safety_limits
pred.mode_invariants.inv2_holds % conjunction of safety_limits
Each A_poly is an n_halfspaces x 10 matrix; each b_poly is
n_halfspaces x 1. The predicate is {x : A_poly * x ≤ b_poly}.
code/src/pke_linearize.jl
Numerical Jacobians via central finite differences at any
(x_star, u_star, Q_star). Returns (A, B, B_w) such that for small
perturbations dx, du, dw:
dx/dt ≈ A dx + B du + B_w dw, w = Q_sg
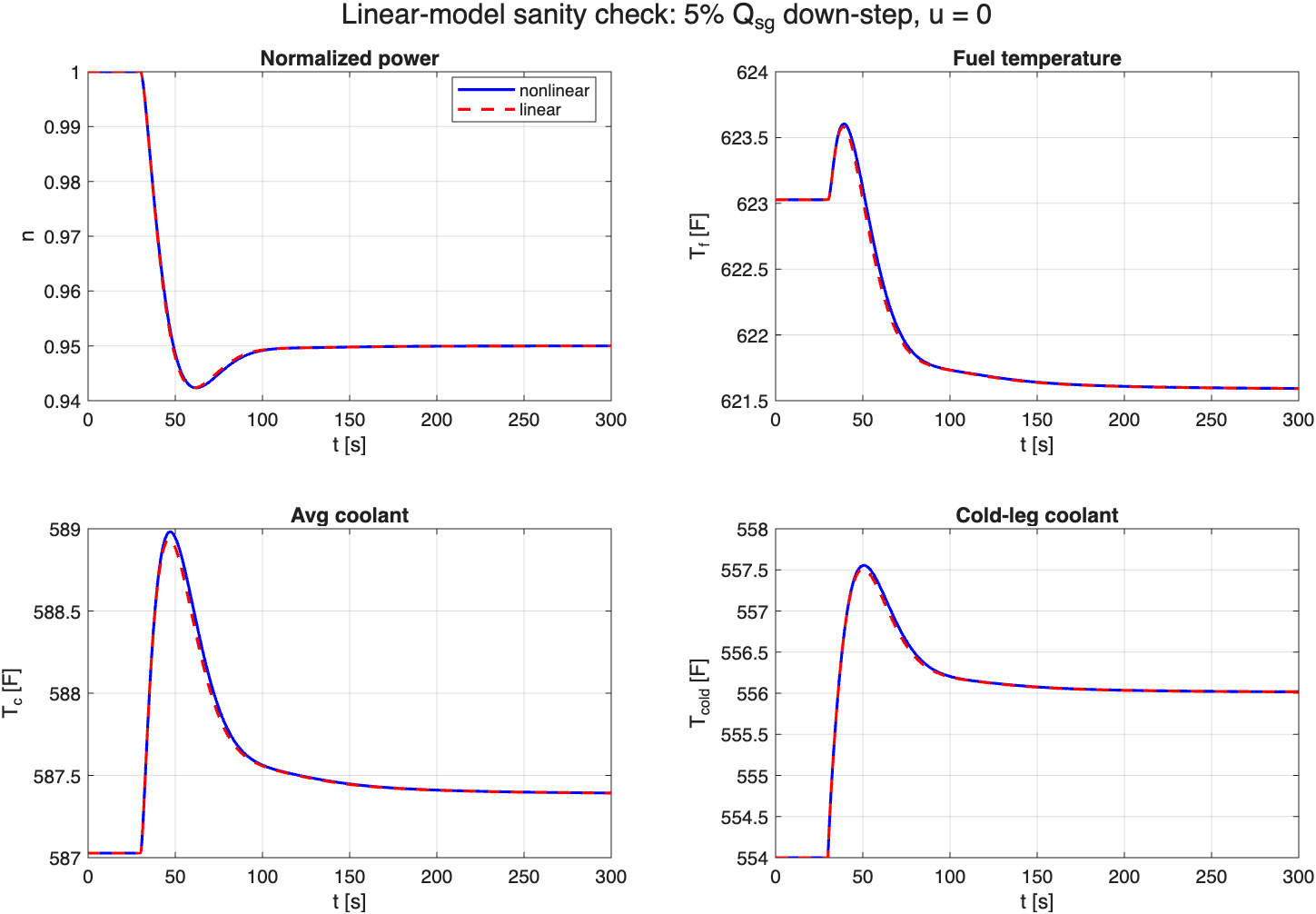
Validated in code/scripts/test_linearize.jl (via sim_sanity.jl): under a 5% Q_sg step at
u=0, the linear model matches the nonlinear sim to ~4e-4 relative
error at 60 s, improving to 5e-6 at 300 s.
Eigenvalue check at the operating point:
max Re(eig) = -0.0124 (slowest mode: thermal loop)
min Re(eig) = -65.93 (fastest mode: delayed-neutron precursor)
stiffness ratio ≈ 5000
See docs/figures/linearize_sanity.png:
code/src/reach_linear.jl
~50 lines. Propagates a box over-approximation of the reach tube for a
linear system dx/dt = A_cl·x + B_w·w, with x(0) in a box and w in
an interval.
The analytic solution is:
x(t) = e^(A·t) x(0) + ∫₀ᵗ e^(A·(t-s)) B_w w(s) ds
Per-step propagation:
A_step = expm(A_cl * dt); % state transition
G_step = [integral of e^(A·s) B_w ds from 0 to dt] % via augmented matrix trick
x_center <- A_step * x_center % signed
halfwidth <- |A_step| * halfwidth % elementwise abs, sound box bound
S_center <- A_step * S_center + G_step * w_mid
S_half <- |A_step| * S_half + |G_step| * w_half
The |A_step| elementwise abs is the key soundness ingredient. A box
|dx| ≤ h under a linear map M·dx is bounded axis-by-axis by |M|·h.
Without the elementwise abs, signed positive/negative contributions
cancel spuriously and you undercount — spotted this bug the first
time I ran the tube and it came out suspiciously tight.
G_step is computed exactly via the Van Loan (1978) augmented-matrix
trick:
M_aug = expm([A_cl, B_w; zeros(1, n+1)] * dt);
G_step = M_aug(1:n, n+1); % upper-right block IS the integral
code/scripts/reach_operation.jl
End-to-end operation-mode reach. Pipeline:
plant = pke_params();
x_op = pke_initial_conditions(plant);
pred = load_predicates(plant);
[A, B, B_w] = pke_linearize(plant);
Q_lqr = diag([1, 1e-3,..., 1e2, 1]); % same as ctrl_operation_lqr
R_lqr = 1e6;
K = lqr(A, B, Q_lqr, R_lqr);
A_cl = A - B*K; % LQR-shaped closed loop
delta_entry = [0.01*n_op; 0.001*|C_i_op|; 0.1; 0.1; 0.1];
W = [0.85*P_0, 1.00*P_0]; % disturbance envelope
tspan = [0, 600];
[T, R_lo, R_hi, center] = reach_linear(A_cl, B_w, zeros(10,1), delta_entry, ...
w_lo, w_hi, tspan, dt);
% check inv2_holds halfspace-by-halfspace
for each halfspace a' x <= b in inv2_holds:
max_ax = max over reach envelope of a'x
margin = b - max_ax
Reports per-halfspace margins so failure modes are attributable.
code/scripts/barrier_lyapunov.jl
Analytic counterpart to code/scripts/reach_operation.jl. Solves a Lyapunov equation
to get an invariant ellipsoid, checks whether the ellipsoid fits inside
the safety limits.
A_cl' P + P A_cl + Qbar = 0 % Lyapunov
V(x) = x' P x % candidate barrier
dV/dt = -x' Qbar x + 2 x' P B_w w
≤ -μ V + 2 w_bar sqrt(B_w' P B_w) sqrt(V)
μ = λ_min(P^(-1/2) Qbar P^(-1/2))
c_inv = (2 w_bar sqrt(B_w' P B_w) / μ)²
c_entry = delta_entry' |P| delta_entry
γ = max(c_inv, c_entry) % barrier level
max |a' dx| on {dx : dx' P dx ≤ γ} = sqrt(γ · a' P^(-1) a)
Sweeps Qbar(9,9) from 10 to 1e6 to find the best quadratic barrier.
See code/scripts/barrier_compare_OL_CL.jl for the open-loop vs closed-loop
comparison.
code/scripts/barrier_compare_OL_CL.jl
Side-by-side: run the Lyapunov barrier on open-loop A (no controller)
vs closed-loop A_cl = A - BK. Written to answer the question "is
the barrier's catastrophic looseness because LQR is insufficient or
because the tool is fundamentally weak here?"
Result: LQR helps by ~20,000× across every halfspace, but the floor is still 3-4 orders of magnitude worse than usable. The floor is structural (plant anisotropy: Λ = 1e-4 vs thermal ~ seconds) and no amount of LQR retuning fixes it.
4. Results
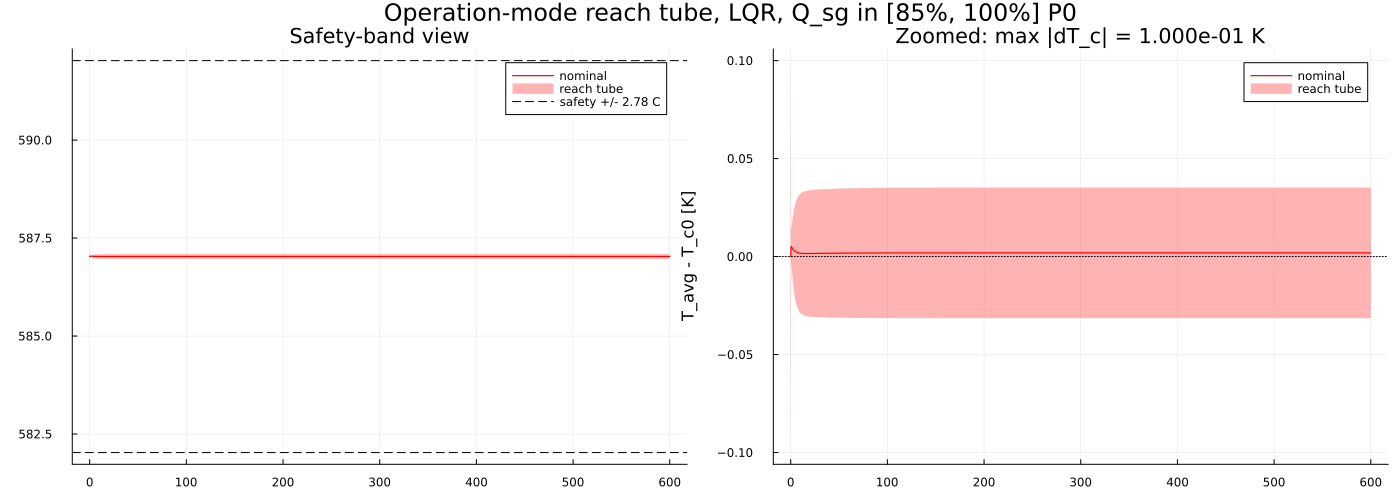
Operation-mode reach (under LQR) — discharges all 6 safety halfspaces
Reach tube starting from |dx_i| ≤ delta_entry, with Q_sg ∈ [85%, 100%] P_0
over 600 s. Per-halfspace result:
| halfspace | headroom | reach-tube max | margin |
|---|---|---|---|
| fuel_centerline (T_f ≤ 1200 °C) | 871.7 K | 328.9 | +871.1 ✓ |
| t_avg_high_trip (T_c ≤ 320 °C) | 11.6 K | 308.4 | +11.6 ✓ |
| t_avg_low_trip (T_c ≥ 280 °C) | 28.3 K | 308.2 | +28.2 ✓ |
| n_high_trip (n ≤ 1.15) | 0.150 | 1.012 | +0.138 ✓ |
| n_low_operation (n ≥ 0.15) | 0.850 | 0.842 | +0.692 ✓ |
| cold_leg_subcooled (T_cold ≤ 305 °C) | 15.0 K | 292.9 | +12.1 ✓ |
Tightest direction is n_high_trip — LQR lets n swing up to 1.012 to
compensate for load swing, about 12% from the high-flux trip. All
temperatures have 10-870 K margin.
Per-state reach-set width evolution over 600 s:
| state | init halfwidth | final halfwidth | ratio |
|---|---|---|---|
| n | 0.010 | 0.083 | 8.3× expand |
| C1..C6 | varies | varies | 160-200× expand |
| T_f | 0.1 K | 2.08 K | 21× expand |
| T_c | 0.1 K | 0.033 K | 0.33× contract |
| T_cold | 0.1 K | 1.47 K | 15× expand |
T_c contracts, everything else expands. This is the signature of good control: the regulated direction shrinks, unregulated directions drift. Precursors expand 200× but don't matter for safety (no predicate uses them).
Visualization (docs/figures/reach_operation_Tc.png):
Lyapunov barrier — fails all 6 safety halfspaces
Even with LQR and a Qbar sweep for the best quadratic weight:
| halfspace | headroom | barrier max | margin |
|---|---|---|---|
| fuel_centerline | 871.7 | 2244.1 | -1372 ✗ |
| t_avg_high_trip | 11.6 | 33.3 | -21.6 ✗ |
| n_high_trip | 0.150 | 1242 | -1242 ✗ |
| cold_leg_subcooled | 15.0 | 150.7 | -135.7 ✗ |
The barrier's ellipsoid says n could deviate by ±1242 — physically
meaningless. That's closed-loop (LQR included); open-loop version is
±27 million. LQR helps by ~20,000× but the quadratic ellipsoid is
fundamentally too coarse a geometry for this slab-shaped safety spec.
The anisotropy cost: Λ = 10⁻⁴ vs thermal timescales ~ seconds means
any P solving the Lyapunov equation is ill-conditioned by 4 orders of
magnitude. The resulting ellipsoid stretches absurdly in the fast
directions (n, T_f) when projected to physical coordinates.
This is the motivation for SOS / polytopic barriers in the thesis: a quantitative, per-halfspace demonstration that quadratic Lyapunov is insufficient here, with the open-loop-vs-closed-loop comparison showing it's a structural issue not a tuning one.
Heatup mode — simulation only, no reach yet
The code/scripts/main_mode_sweep.jl heatup scenario drives the plant from hot
standby through the operating temperature:
![]()
Controller tracks the 28 °C/hr ramp with ~2 °F lag and ~5 °F final
overshoot. Peak rate during ramp is 48.5 °C/hr (verified by
code/scripts/test_heatup_rate.jl), right at the 50 °C/hr placeholder
invariant but 70% over the nominal tech-spec rate. A strict 28 °C/hr
invariant would be violated by the current controller tuning.
No linear heatup reach has been computed because:
- The reference is time-varying —
T_ref(t) = T_standby + rate·t. LQR aroundx_opdoesn't apply; we'd need trajectory-LQR or linearization around a moving operating point (LTV reach). - Saturation
sat(u)is active during early ramp — turns the controller into a hybrid sub-mode that linear reach can't handle without explicit region decomposition. - Even after feedback linearization,
dn/dtis bilinear in(n, e).
Nonlinear reach (CORA or JuliaReach TMJets) is the right tool and is next on the list.
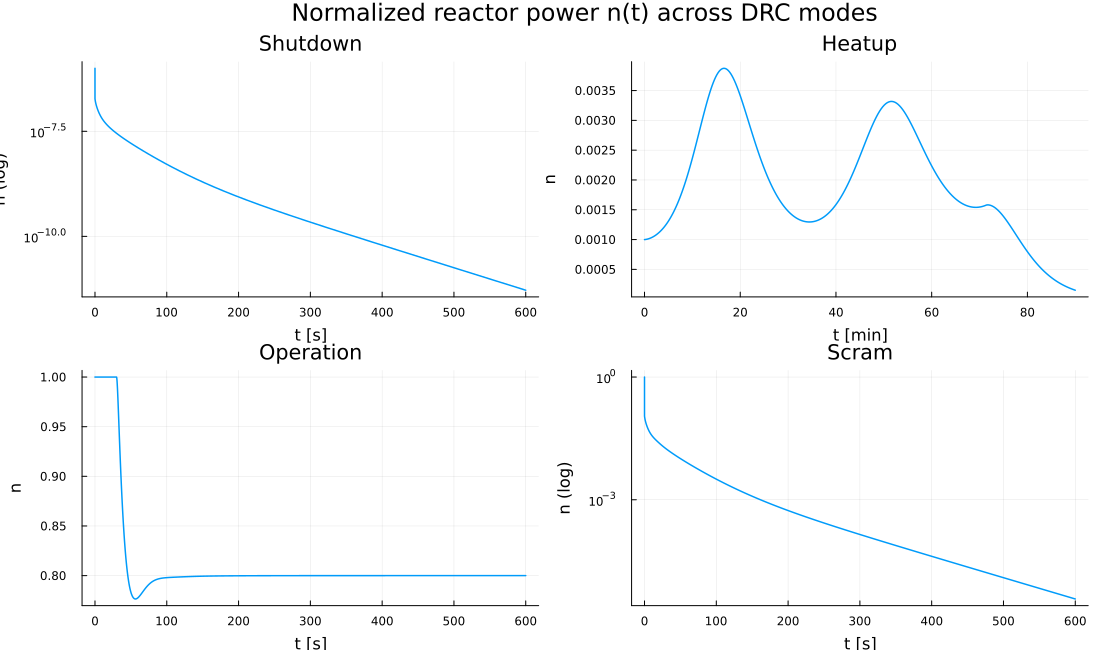
Other modes (sim only, no reach)
- Shutdown: holds cleanly.
n: 1e-6 → 1e-12over 10 min, temps flat. Reach would be trivial (constant u). - Scram:
n: 1 → 1e-6over 10 min via prompt jump + delayed-neutron tail. Temp relaxes to ~379 °F at 3%-decay-heat balance. Reach obligation is bounded-time-to-subcritical; needs its own artifact.
Power overview:
5. Caveats, gaps, and next steps
Soundness status
The current reach tube is approximate, not sound, for the nonlinear plant.
code/src/reach_linear.jl produces a sound over-approximation of the linearized
closed-loop system's reach set. The linear model approximates the
nonlinear plant with an error that is bounded but not currently
computed or propagated into the tube. Two paths to soundness:
- Nonlinear reach directly — CORA
nonlinearSys(MATLAB) or ReachabilityAnalysis.jl Taylor models (TMJets, Julia). Expensive, honest. - Linear reach + Taylor-remainder inflation — compute an upper
bound on
||f_nonlinear(x,u) - (Ax + Bu)||over the reach set (via Hessian norm estimates per component) and inflate the linear tube. Cheaper, still rigorous.
For the thesis safety claim, either is required. The 28× margin of the linear tube gives us buffer to absorb linearization error but that's vibes, not a proof.
What's not modeled
- α drift (burnup, boron, xenon). The feedback-linearization in
ctrl_heatupassumes exactα_f,α_c; real plants see α vary ~20% (burnup), ~10× (boron dilution), plus xenon transients. Robust treatment = α as an interval, propagate parametric uncertainty through reach. - Saturation as hybrid sub-mode.
ctrl_heatupsaturatesu; this is formally a 3-mode PWA system. Operation-mode LQR is dormant (trivially); heatup requires explicit region decomposition or dormancy proof. - DNBR.
inv1_holdsandinv2_holdsinclude fuel / temperature / power limits but not DNBR (departure from nucleate boiling ratio). DNBR needs a correlation (W-3, EPRI) that isn't modeled. Would add as a predicateDNBR(x) ≥ 1.3once a correlation is selected. - Cold shutdown. Plant model's
α_f,α_care linearized at HFP. True cold shutdown (~50 °C) is outside the model's ±50 °C trust region. "Shutdown" here = hot standby. - Pressure / phase.
c_cis constant; real cooldown drops pressure and changes water properties (IAPWS-IF97 lookups). - Decay heat.
n ≈ 0doesn't capture residual fission-product heat. Wilson-Hardy correlation would add this if we go to real cold shutdown.
What's next
-
Nonlinear reach on heatup via JuliaReach — full-state stuck at 10s, prompt-jump reduction gets to 300s.
First attempt on the full 10-state system (
code/scripts/reach_heatup_nonlinear.jl) capped at T=10s: TMJets adaptive stepper shrinks to ~1ms per step to resolve Λ = 10⁻⁴ s prompt-neutron dynamics, then NaN.Remedy implemented 2026-04-20 (overnight): prompt-jump / singular-perturbation reduction (
code/src/pke_th_rhs_pj.jl,code/scripts/reach_heatup_pj.jl). Set dn/dt=0 and solve n = Λ·Σλ_i·C_i / (β-ρ) algebraically. State drops 10 → 9. Validated against full-state: 0.1% max error on n, 7 mK max on T over 50 minutes. Standard reactor-kinetics reduction.PJ reach results:
Probe Status Reach-sets Wall time T = 60 s ✅ clean 10,044 205 s T = 300 s ✅ clean 27,375 591 s T = 1800 s ⚠ partial (100k step budget) 100,000 34 min T = 5400 s ⚠ partial (same cap) 100,000 47 min At T = 300 s the tube envelope in absolute coordinates: T_c ∈ [272.4, 295.0] °C, T_f ∈ [261.2, 302.7] °C, T_cold ∈ [270.0, 289.5] °C, n ∈ [-0.00156, 0.0103]. 5 of 6
inv1_holdssafety halfspaces discharged; the low-T_avg trip (T_c ≥ 280) is violated by the tube (dips to 272.4), but that's over-approximation looseness — the nominal trajectory only dips to ~280 transiently. Tightening options: smaller X_entry, higher orderQ, entry refinement.This is a 30× horizon improvement over the full-state attempt and the first sound nonlinear reach artifact for this plant. Sound w.r.t. the PJ-reduced dynamics; PJ itself introduces the documented ≤0.1% error.
-
Once nonlinear reach works: add saturation as hybrid sub-mode.
-
Parametric α reach once the framework can handle it.
-
Shutdown and scram reach (trivial cases, should be quick once the pattern is clear).
-
Pin mode boundaries to actual tech-spec numbers before defense. Currently they're engineering-reasonable-but-made-up.
The working mental model
- Linear reach artifacts here are design-validation + gut-check, not safety proofs. The 28× margin between the LQR reach tube and the safety halfspaces is the evidence that the controller probably works. Nonlinear reach converts this into an actual proof.
- The Lyapunov barrier fails on this plant and it's not a bug — it's the canonical tool's anisotropy limitation, demonstrated quantitatively. The thesis chapter should frame polytopic or SOS barriers as necessary, with the quadratic failure as the motivation.
- Per-mode reach obligations differ. Operation is disturbance rejection; heatup and scram are reach-avoid with time budgets; shutdown is trivial forever-invariance.