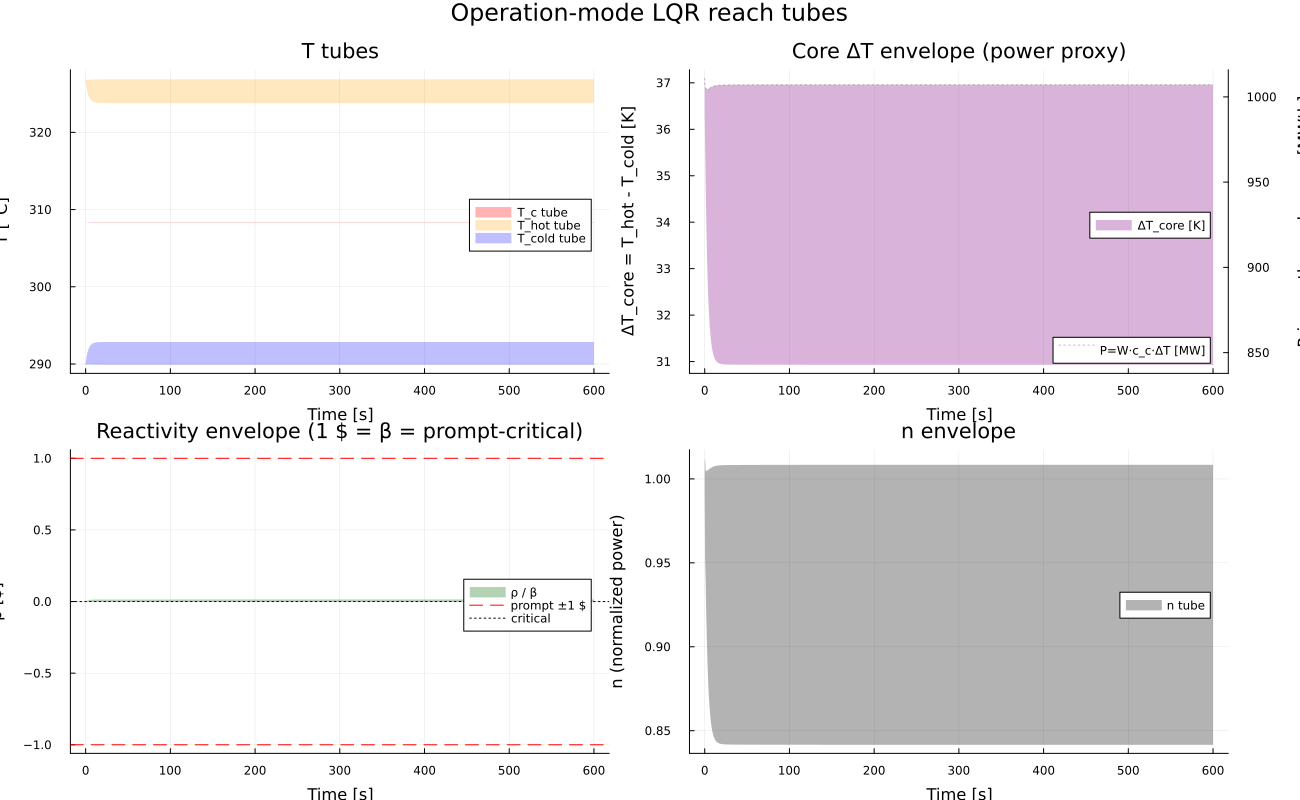
Following user's review feedback (point 1): prompt_critical_margin_heatup: a new entry under safety_limits that proves the PJ reduction's validity condition (beta - rho > 0 with margin) rather than hand-waving it. Controller-specific specialization for heatup: under feedback linearization, rho_total = Kp*(T_ref - T_c), so rho ≤ 0.5*beta iff T_c ≥ T_ref - 32.5. Worst-case T_ref = T_c0 at ramp end, so T_c ≥ 275.85 is sufficient, which our tight-entry reach clears trivially. Conjoined into inv1_holds. Safety proofs now target BOTH the physical bounds AND the conditions that make the PJ approximation sound. Saves Dane's rigor-over-vibes instinct (saved to memory). plot_reach_tubes.jl: four-panel visualization of a reach-result .mat: (1) T_c / T_hot / T_cold envelopes overlaid (2) ΔT_core = T_hot - T_cold (power proxy, right-axis MW) (3) rho envelope in dollars, with ±1$ prompt lines (4) n envelope Operation-mode plot saved to docs/figures/reach_operation_tubes.png. Heatup PJ version pending — needs full per-step data from the running reach_heatup_pj_tight_full.jl. reach_heatup_pj.jl + reach_heatup_pj_tight_full.jl now save per-timestep envelopes (t_arr, Tc_lo_ts, Tc_hi_ts, ...) so the plotting script can overlay tubes vs time. Next up: polytopic / SOS barriers, Tikhonov error bound for PJ. Co-Authored-By: Claude Opus 4.7 (1M context) <noreply@anthropic.com>
86 KiB
1300x800px
86 KiB
1300x800px
{kind=link}
{kind=link}